Handbuch: 5.3. IHM-Konzepte
Die Methoden des maschinellen Lernens nutzen empirische Daten, die in der Vergangenheit an einer Maschine gemessen wurden, als diese Maschine sich erwiesenermaßen in einem gesundem Zustand befand. Aus diesen Daten konstruieren die Methoden des maschinellen Lernens automatisch und ohne menschliches Zutun eine mathematische Repräsentation der Beziehungen aller Parameter rund um diese Maschine.
Es kann mathematisch bewiesen werden, dass ein neuronales Netz in der Lage ist, einen komplexen Datensatz mit großer Genauigkeit darzustellen, solange das Netz groß genug ist und die Daten stets denselben Gesetzen gehorchen. Weil die Maschine den Naturgesetzen unterliegt, ist diese Voraussetzung natürlich gegeben. Aus diesem Grund verwenden wir ein neuronales Netz als Rahmenwerk, bei dem jede einzelne Messung an der Maschine im Zusammenhang mit den anderen Messungen der Maschine modelliert wird. Der Algorithmus des maschinellen Lernens findet die richtigen Werte für die Modell-Parameter, so dass das neuronale Netz die Daten genau repräsentiert.
Die Auswahl der Messungen, die für die Modellierung einer ganz bestimmten Messung in Betracht gezogen werden, kann automatisch erfolgen. Dazu benutzen wir eine Kombination zwischen Korrelationsmodellierung und Hauptkomponentenanalyse.
Das Ergebnis ist, dass jeder Tag der Maschine eine Formel erhält, mit deren Hilfe der erwarteten Wert dieser Tag berechnet werden kann. Weil diese Formel auf Daten basiert, die sich erwiesenermaßen als gesund herausstellten, gilt diese Formel als die Definition des Gesundheitszustandes der Maschine. Ungesunde Zustände werden dann als Abweichungen von diesem Gesundheitszustand betrachtet.
Es ist wichtig, den optimalen Gesundheitszustand zu modellieren und nach Abweichungen von diesem Ausschau zu halten, da diese Gesundheit ja als der normale Zustand gilt, und für das normale, gesunde Verhalten liegen ja auch sehr viele Daten vor. Wenige Daten gibt es indes für Zustände, die ungesund sind, und überdies sind diese Daten auch sehr verschiedenartig – aufgrund einer Unzahl von unterschiedlichen Fehlfunktionen. Solche Fehlfunktionen unterscheiden sich je nach Hersteller und Modell einer Maschine, was die umfassende Darstellung von möglichen Fehlerquellen sehr komplex macht. Fehlerhafte Zustände zu beschreiben ist also weniger ein Problem der Datenanalyse als vielmehr ein Problem der Datenverfügbarkeit. Darum ist dieses Problem von fundamentaler Bedeutung, das in der Praxis aber kaum umfassend angegangen werden kann.
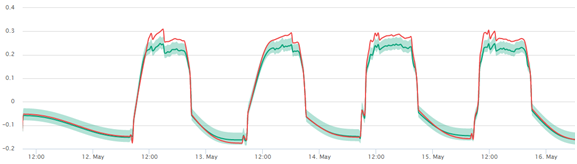
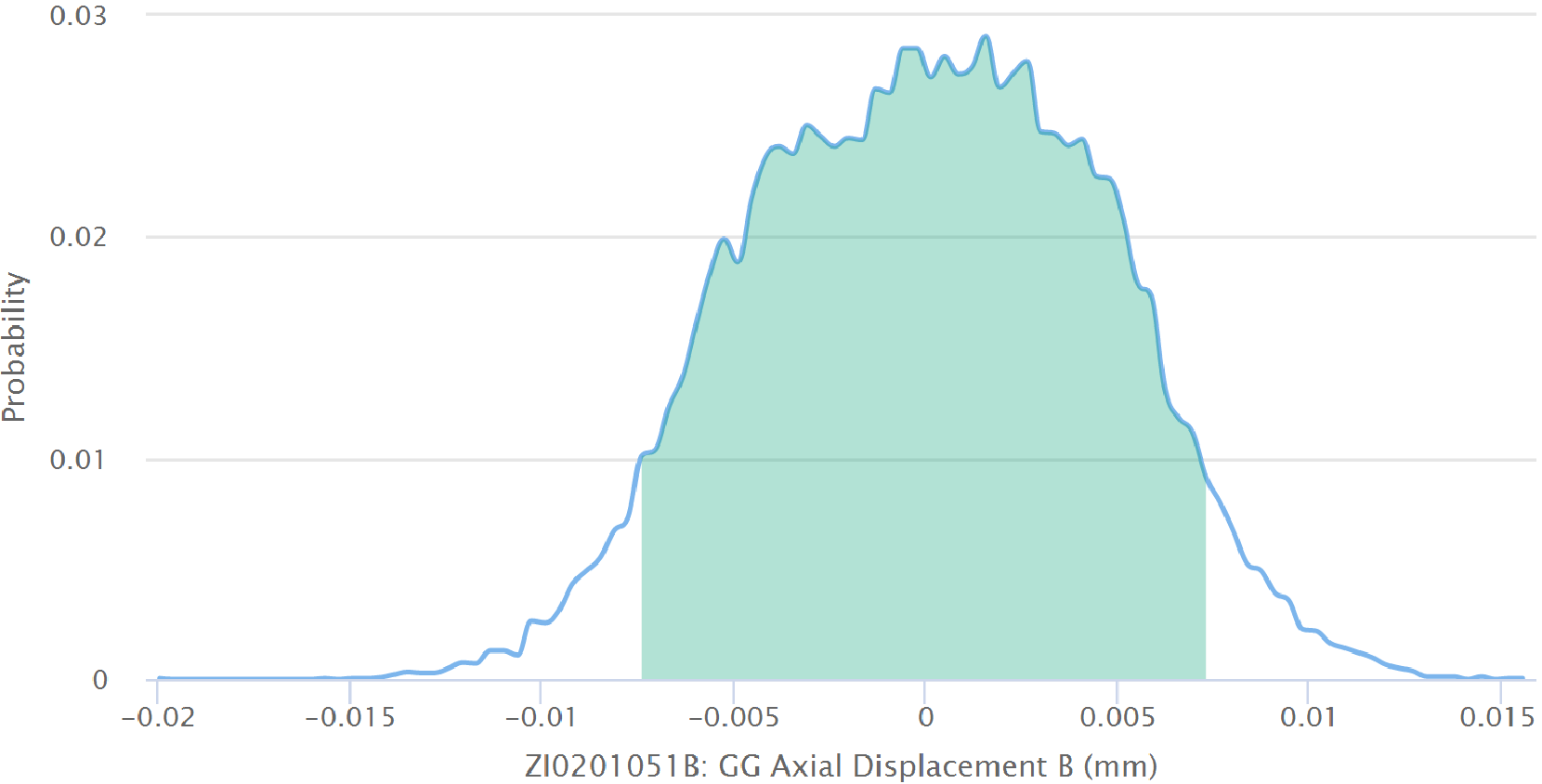
Wir können jederzeit den erwarteten gesunden Wert mit dem gemessenen Sensorwert vergleichen. Weil sich der erwartete Wert aus dem Modell ergibt, kennen wir die Wahrscheinlichkeitsverteilung der Abweichungen, d.h. wir können vorhersagen, wie wahrscheinlich es ist, dass eine Messung von dem erwarteten (gesunden) Wert um einen bestimmten Betrag abweichen wird. Von dieser Wahrscheinlichkeitsverteilung können wir somit die Wahrscheinlichkeit eines gesunden Zustands berechnen oder, umgekehrt, das Konfidenzintervall dazu nutzen, um einzuschätzen, ob ein Sensorwert zu weit vom gesunden Zustand abweicht. In einem solchen Fall wird ein Alarm ausgelöst.
Der Alarm kann noch ergänzt werden durch die Information darüber, wie ungesund der Zustand ist, indem die Wahrscheinlichkeit eines schlechten Gesundheitszustands angegeben wird. Da der erwartete Zustand auf der Basis einer (gewöhnlich kleinen) Anzahl anderer Maschinen-Parameter berechnet wurde, ist es im Allgemeinen möglich, die Ursache einem anderen Messwert zuzuschreiben. Damit wird dem menschlichen Ingenieur eine Hilfestellung gegeben, der sich bei Auslösen eines Alarms um die Diagnose des Problems bemühen wird und eine Gegenmaßnahme ergreifen will.
Bei einem üblichen Condition Monitoring zeigt sich in der Praxis oft, dass, wenn eine Maschine von einem stabilen Zustand in einen anderen stabilen Zustand wechselt, dann zahlreiche (falsche) Alarme ausgelöst werden, da ein einfacher Analyseansatz mit den sich schnell verändernden Bedingungen nicht fertig wird. Ein neuronales Netz hingegen kann ohne Weiteres extrem nicht-lineare Beziehungen darstellen; sogar ein Hochfahren der Maschine oder ein Lastwechsel können präzise modelliert werden, ohne dass ein Alarm ausgelöst wird, solange sonst alles so ist, wie es sein soll.